Raspberry PI Rotary Encoder Control Code |
|
|
Rotary encoders are designed for infinite circular turns in both direction. You can press the top button to send out an extra event. Encoders can sense if they are turned in full, half or quarter rounds depending on the type of the encoder. They send out these turns in bit arrays. To see the prompt bit arrays you should receive, please check the datasheet of the encoder you are using. You can find datasheets on the internet. When the rotary encoder is turned by someone or the button is pressed an event is sent from the device. |
|
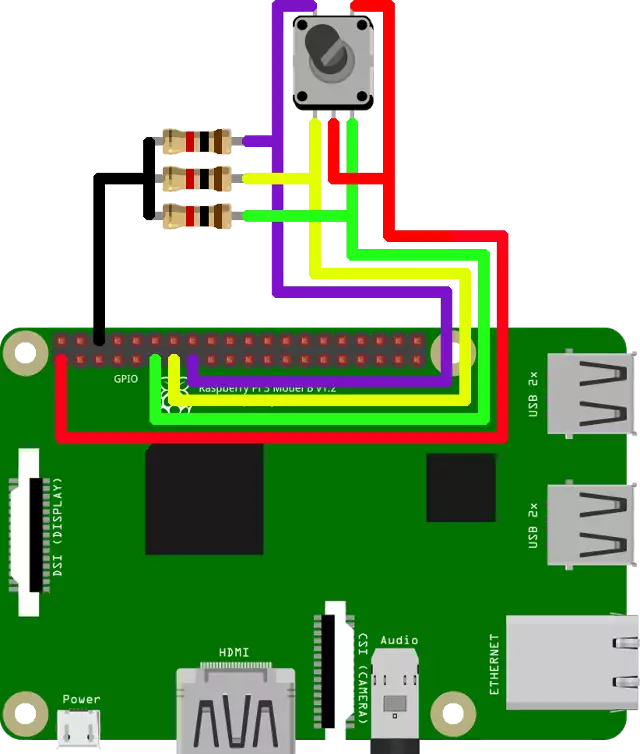
Required hardware
|
Source code to install on controller
import RPi.GPIO as GPIO
from time import sleep
counter = 10
Enc_A = 17
Enc_B = 27
def init():
print "Rotary Encoder Test Program"
GPIO.setwarnings(True)
GPIO.setmode(GPIO.BCM)
GPIO.setup(Enc_A, GPIO.IN)
GPIO.setup(Enc_B, GPIO.IN)
GPIO.add_event_detect(Enc_A, GPIO.RISING, callback=rotation_decode, bouncetime=10)
return
def rotation_decode(Enc_A):
global counter
sleep(0.002)
Switch_A = GPIO.input(Enc_A)
Switch_B = GPIO.input(Enc_B)
if (Switch_A == 1) and (Switch_B == 0):
counter += 1
print "direction -> ", counter
while Switch_B == 0:
Switch_B = GPIO.input(Enc_B)
while Switch_B == 1:
Switch_B = GPIO.input(Enc_B)
return
elif (Switch_A == 1) and (Switch_B == 1):
counter -= 1
print "direction <- ", counter
while Switch_A == 1:
Switch_A = GPIO.input(Enc_A)
return
else:
return
def main():
try:
init()
while True :
sleep(1)
except KeyboardInterrupt:
GPIO.cleanup()
if __name__ == '__main__':
main()